3Dロボットビジョンカメラ
<特長>
・ホワイトライト3Dカメラ(パターン投影)では計測距離全てに焦点を合わせる事が出来ませんが
レーザー方式では深いエリア全てに焦点が合い安定した計測が可能。
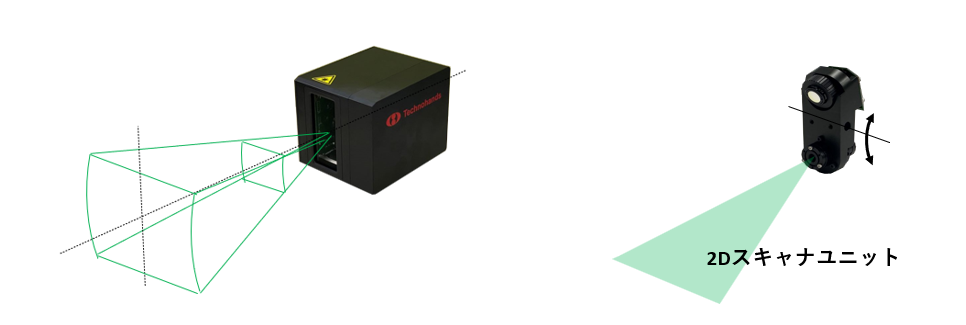
・レーザーによる3D(面)計測カメラの実現。
・2Dスキャナとアクチュエータとの組み合わせにより広範囲スキャンを実現。
・機構部、制御部を同一筐体に組込コンパクト化。ロボットハンド等に取り付け可能。
・オプションにて通信の無線化を可能。
<用途>
・協働ロボットハンドに取付し、計測範囲の死角を軽減。
・ピッキングロボットに取付し、深度のあるワークも選定可能。
| 項 目 | 仕 様 |
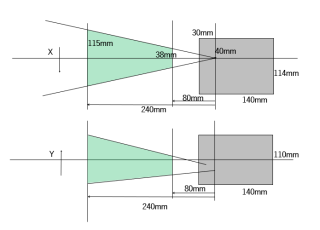
| X軸(幅) | 計測範囲:38mm(近距離)~115mm(遠距離) 分解能:0.084mm(近距離)~0.256mm(遠距離) |
| Y軸(高さ) | 計測範囲:38mm(近距離)~100mm(遠距離) 分解能:0.48mm(近距離)~1.25mm(遠距離) |
| Z軸(深さ) | 計測範囲:80mm(近距離)~240mm(遠距離) Z軸精度:0.006mm(近距離)~0.07mm(遠距離) |
| 計測ポイント数 | 451×80ライン |
| 1ライン速度 | 100Hz(10mS) |
| 1画面走査 | 0.8sec |
| レーザー光源 | グリーンレーザー(520nm) |
| レーザークラス | クラス 2 |
| インターフェース | ethernet |
| データ出力 | XYZ 点群座標(DLL供給) |
| 外部同期 | 外部入力信号による計測制御、計測同期信号の出力 |
| 電源 | DC15~24V |
| 寸法(W×D×H) | 114×110×140mm |
| 重量 | 2,000g |
<計測範囲>
※1 上記はベース機の仕様になります。
使用用途により計測範囲、計測分解能等の変更が可能です。
変更に伴い精度、速度は変化します。